CÁCH LỰA CHỌN CÔNG SUẤT CHO ĐỘNG CƠ SERVO
Giải pháp tự động
cty tnp
Giám sát từ xa qua internet







Danh mục
- TỦ ĐIỆN LÒ HƠI - LÒ ĐỐT
-
MÀN HÌNH HMI

-
SERVO MITSUBISHI
-
PLC MITSUBISHI
- LẮP ĐẶT ĐIỆN NĂNG LƯỢNG MẶT TRỜI
- TỦ ĐIỆN MÁY CẮT BAO BÌ
-
SERVO DELTA
- TỦ ĐIỆN XỬ LÝ NƯỚC
-
SERVO YASKAWA
- TỦ ĐIỆN MÁY Ó KEO - MÁY KÉO BAO
- TỦ ĐIỆN MÁY BẺ ĐAI - MÁY BẺ SẮT
- TỦ ĐIỆN MÁY ĐAN LƯỚI B40
- TỦ ĐIỆN MÁY CNC MINI DÙNG MACH3
- TỦ ĐIỆN MÁY ĐÁNH MỘNG - NGÀNH GỖ
- MÀN HÌNH MÁY BẺ ĐAI
- THAY CẢM ỨNG MÀN HÌNH WENVIEW
- CẢM BIẾN
- BIẾN TẦN MÁY CẮT BAO BÌ
- SERVO MÁY CẮT BAO BÌ
- CONVERTER ETHERNET
- BỘ ĐIỀU KHIỂN MÁY BẺ ĐAI
- THIẾT BỊ TỰ ĐỘNG MITSUBISHI
-
SERVO POWMAX

Tin tức & sự kiện











Báo giá
CÁCH LỰA CHỌN CÔNG SUẤT CHO ĐỘNG CƠ SERVO
CÁCH LỰA CHỌN CÔNG SUẤT CHO ĐỘNG CƠ SERVO
TNP xin chào các bạn. Trong bài viết trước, chúng tôi đã gửi tới các bạn nội dung về lựa chọn vít me, một phần tử chuyển động. Bây giờ, cùng với thanh dẫn hướng tuyến tính đã được lựa chọn trước đó, bộ phận chuyển động có thể di chuyển theo hướng cố định với tốc độ và quãng đường như dự định. Ở trạng thái này, bộ phận chuyển động có thể chuyển động ngay cả khi đầu trục vít me được quay bằng tay. Nhưng để vận hành tự động, chúng ta hãy chọn một động cơ servo làm nguồn truyền động.

1. Động cơ servo
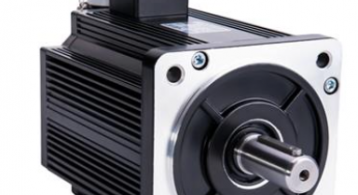
1.1 Động cơ servo là gì
Động cơ servo là một bộ phận của hệ thống điều khiển chuyển động của máy móc. Động cơ Servo cung cấp lực chuyển động cần thiết cho các thiết bị máy móc khi vận hành.
Trong những năm gần đây, với các hệ thống tự động hóa (máy FA), một hệ thống máy có thể đáp ứng nhu cầu sản xuất nhiều loại sản phẩm và rút ngắn thời gian sản xuất đã trở nên cần thiết. Vì lý do này, việc xử lý các vấn đề nêu trên trở nên khó khăn nếu cứ sử dụng động cơ không đồng bộ điều khiển bằng cảm biến dừng hay là sử dụng xi lanh khí nén. Do đó, việc sử dụng động cơ servo với ưu thế có thể tự do điều khiển tốc độ và vị trí ngày càng trở nên phổ biến.
1.2 Động cơ servo và động cơ không đồng bộ khác nhau như thế nào?
Động cơ servo thường được sử dụng làm nguồn truyền động cho các thiết bị như cơ cấu gắp và thả vật (P&P), nhưng sự khác biệt so với động cơ không đồng bộ là gì?
Sự khác biệt đó là hai động cơ có cấu trúc bên trong khác nhau (cách bố trí cuộn dây và nam châm), nhưng điểm khác biệt lớn nhất là động cơ servo có thêm một bộ mã hóa encoder (quay) và vì thế bản thân động cơ có thể xác định được vị trí của chúng. Tốc độ (tốc độ quay) có thể được tính toán từ sự thay đổi vị trí theo thời gian. Điều này cho phép động cơ servo di chuyển đối tượng đến vị trí mục tiêu với tốc độ mong muốn .
Việc sử dụng động cơ servo có cấu hình hệ thống được mô tả trong sơ đồ sau đây.
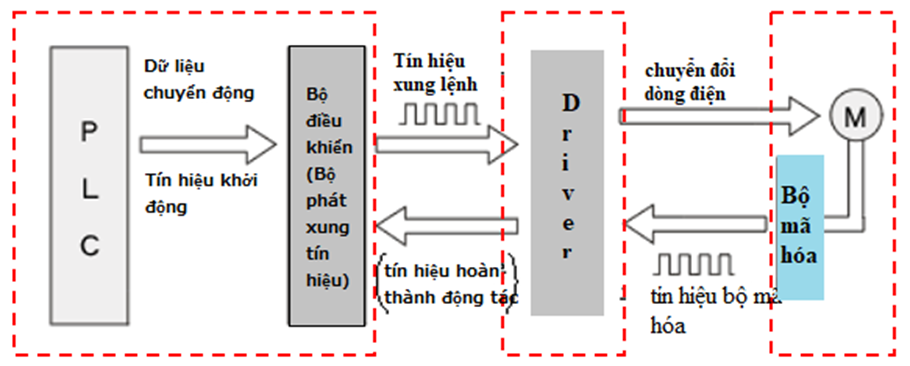
Hệ thống máy và tủ điện được mô hình hóa. Những gì bạn có thể nhìn từ sơ đồ trên gồm 3 khối và mỗi khối được phân biệt bởi đường nét đứt màu đỏ. Dây cáp kết nối chúng với nhau.
Khối thứ nhất gồm PLC và bộ phát xung được tích hợp sẵn trong PLC hoặc như là một mô đun mở rộng của nó. Khối thứ hai, khối điện tử công suất Driver (khối khuếch đại) được cấu tạo bởi mạch điều xung, mạch đệm để đóng mở các van bán dẫn công suất được tích hợp bên trong, và khối này được bố trí bên trong tủ điện. Khối thứ 3 là khối động cơ tích hợp bộ mã hóa được bố trí trong hệ thống máy.
PLC (bộ điều khiển) đưa ra các lệnh cho bộ phát xung. Dựa trên xung lệnh nhận được từ bộ phát xung, mạch điều xung và mạch đệm trong khối điện tử công suất Driver sẽ điều khiển đóng mở van công suất đưa dòng điện vào động cơ để làm nó quay. Khi động cơ quay, máy chuyển động và một tín hiệu (xung) phản hồi được truyền từ bộ mã hóa Driver. Driver sẽ đối chiếu vị trí mục tiêu đã ra lệnh với xung phản hồi, và nếu có dư hoặc thiếu, lượng đó sẽ được chuyển trở lại động cơ dưới dạng dòng điện. Mô tơ servo lặp lại điều khiển trên trong chu kỳ từ 1 ms (1/1000 giây) trở xuống.

2. Phân loại động cơ servo.
Có hai loại động cơ servo, loại quay và loại tuyến tính.
(Ngoài ra còn có loại dẫn động trực tiếp, nhưng vì ít đa dạng nên tôi sẽ bỏ qua trong bài viết này)
2.1 Động cơ servo loại quay.
Động cơ servo quay là loại được sử dụng phổ biến. Trong động cơ servo quay, bộ truyền động (cuộn dây) và bộ mã hóa (encoder) được tích hợp thành một khối đặt bên trong động cơ. Vì hình dạng là cố định nên rất dễ cân nhắc khi thiết kế.
Ngoài ra, về mặt điều khiển, thông tin động cơ được ghi bên trong bộ mã hóa và nhiều thông tin trong số đó được tự động nhận dạng khi kết nối với Driver.
2.2 Động cơ servo tuyến tính.
Tiếp theo là loại động cơ servo tuyến tính, trong vài năm gần đây, nó đã được sử dụng phổ biến cho các bộ truyền động một trục và ngày càng được nhìn thấy nhiều hơn.
Một ví dụ đơn giản, đó là tuyến tàu siêu tốc (tàu Shinkansen). (Nói một cách chính xác, nó khác với động cơ servo loại quay vì sự sắp xếp vị trí của cuộn dây và nam châm là khác nhau). Động cơ servo tuyến tính bao gồm bộ phận chuyển động (cuộn dây) và bộ phận stato (nam châm), và chỉ cần thêm một thanh dẫn hướng là có thể hoạt động. Ngoài ra, bằng cách kéo dài stato, về mặt lý thuyết nó có thể chạy dài vô hạn. Servo tuyến tính không được trang bị bộ mã hóa, vì vậy cần thiết lập và cài đặt riêng. Mặc dù nó được gọi là bộ mã hóa tuyến tính, có nhiều phương pháp phát hiện khác nhau (loại từ tính, loại quang học) dựa trên mức độ chính xác và độ phân giải, vì vậy hãy chọn nó tùy theo nhu cầu của bạn.
Sự khác biệt lớn nhất giữa servo quay và servo tuyến tính là những gì bộ mã hóa phát hiện. Servo quay phát hiện vị trí (góc) của trục động cơ, nhưng không nhìn thấy chính xác vị trí của tải phía trước. Ví dụ, nếu khớp nối bị trượt, vị trí được chỉ ra bởi bộ mã hóa sẽ khác với vị trí tải thực tế. Ngoài ra, hệ thống máy sử dụng vít me không thể phát hiện được lượng sai số do sự giãn nở nhiệt của vít me. Ngược lại, với các servo tuyến tính, bộ mã hóa sẽ phát hiện vị trí thực tế của tải. Do đó, vị trí được chỉ ra bởi bộ mã hóa chính xác là vị trí của tải. Bản thân bộ mã hóa cũng được làm bằng vật liệu có độ giãn nở nhiệt thấp (thủy tinh, v.v.) và có thể phát hiện vị trí với độ chính xác cao. Vì có sự khác biệt kể trên, các bạn hãy chọn động cơ theo điều kiện cần thiết và mục đích sử dụng.
3. Những tính toán cần thiết khi lựa chọn động cơ servo.
Khi lựa chọn động cơ servo cần yêu cầu nhiều phép tính khác nhau, nhưng trước hết, chúng tôi nghĩ rằng tốt nhất là bạn hãy cố gắng tính toán được hai đại lượng quan trọng sau đây.
· Mô men quán tính.
· Mô men xoắn khi tăng tốc.
Tùy theo điều kiện sử dụng mà cần các phép tính khác nữa, nhưng mình sẽ nhớ và để sau nên tính hai đại lượng này trước nhé.
Mô men quán tính.
Một điều cần lưu ý khi tính toán mômen quán tính là:
A) Tính toán hình dạng vật thể quay (đĩa, trụ,…v.v.)
B) Tính toán trong trường hợp sử dụng bộ điều tốc.
C) Tính toán mô men quán tính của bộ phận chuyển động.
Đây là ba điểm cần lưu ý.
Đầu tiên hãy bắt đầu với :
A) Tính toán hình dạng vật thể quay.
Dưới đây là bảng công thức tính toán mô men quán tính theo hình dạng vật thể
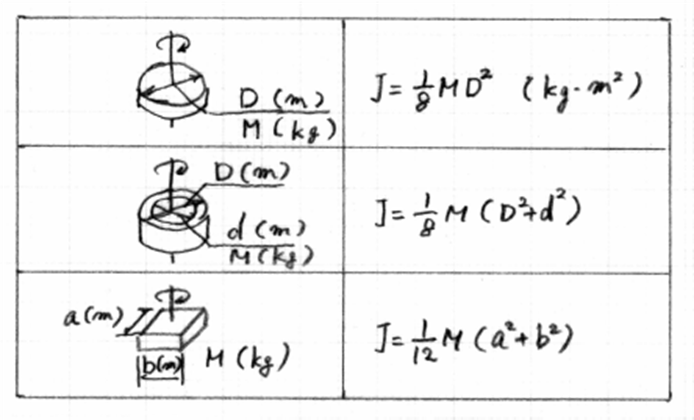
Tuy nhiên để đơn giản tính toán, nói cho cùng thì chỉ sử dụng công thức trên cùng cũng không thành vấn đề.
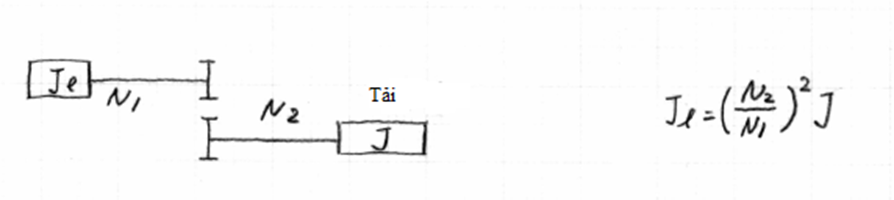
B) Tính toán trong trường hợp sử dụng bộ điều tốc.
Mômen quán tính chuyển sang trục động cơ khi đi qua bộ điều tốc được chia cho bình phương của tỷ số truyền.
Ví dụ, nếu bạn đặt vào trục một tỷ số truyền là 1/5, ta sẽ lấy mô men quán tính chia cho 25, là bình phương của 5. Công thức trên áp dụng trong trường hợp sử dụng bộ điều tốc nhưng điều tương tự cũng áp dụng khi giảm tốc (tăng tốc) bằng hệ bánh răng, v.v. ở giữa hệ thống truyền động.
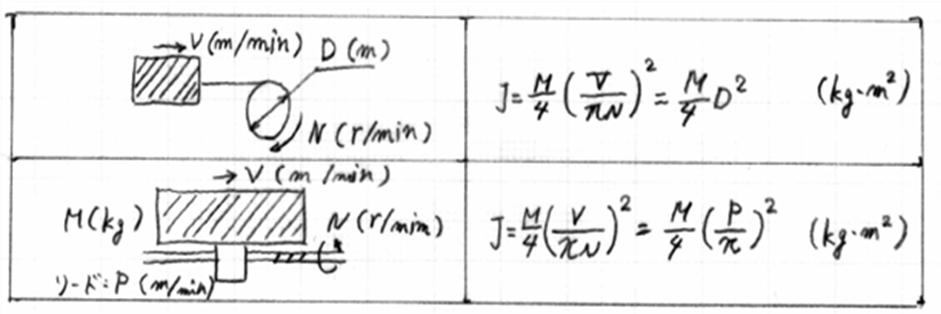
C) Tính toán mô men quán tính của bộ phận chuyển động.
Đây là lúc mà khối lượng là lớn nhất khi xét đến mômen quán tính. Hầu hết các mô hình được tính toán là khi tải đã được bao gồm và di chuyển bằng cách sử dụng các cơ cấu như băng tải, xích hay vít me.
Chúng tôi nghĩ rằng chỉ cần bạn nhớ được phép tính ba thành phần nêu trên đây là đủ.
4. Lựa chọn động cơ servo.

4.1 Tính toán momen quán tính
Bây giờ, chúng ta sẽ đi vào những bước thực sự lựa chọn động cơ servo cho cơ cấu P&P được mô tả trong hình ảnh phía trên. Trong bài trước chúng ta đã chọn vít me cho trục X, bây giờ chúng ta sẽ chọn động cơ cho nó. Như khi lựa chọn Vít me, chúng ta sẽ xem xét qua các thông số và mục tiêu về độ chính xác của thiết bị này.
| Tên gọi thiết bị | Cơ cấu gắp và thả vật | |
| Đối tượng vận chuyển | Vật (Thủy tinh) | Φ63.5 x Φ19.05 x t1.0 W=0.008kg |
| Tốc độ vận hành | Cả 2 trục X, Y | 250 mm/s |
| Quãng đường di chuyển | X | 680 mm |
| Y | 210 mm | |
| Z | 20 mm | |
| Độ chính xác yêu cầu | Cả 2 trục X, Y | ±0.05 mm/500mm |
| STT | Tên thiết bị | Khối lượng | Số lượng | Khối lượng sơ bộ(kg) |
| 1 | Mô tơ trục Y(200W) | 0.8 | 1 | 0.8 |
| 2 | Thanh dẫn hướng(580L) | 0.9 | 2 | 1.7 |
| 3 | Bệ trục Y(A5052) | 2.5 | 1 | 2.5 |
| 4 | Khối điều chỉnh chiều cao thanh dẫn hướng | 0.5 | 2 | 1.0 |
| 5 | Dầm trục Y | 2.1 | 1 | 2.1 |
| 6 | Tay gắp | 1.0 | 1 | 1.0 |
| Tổng khối lượng | 9.1 |
Phần này sau khi thêm khối lượng dự kiến của dây điện và đường ống cấp khí là 2 kg thì khối lượng tổng đạt được là 11.1 kg. chúng ta sẽ tính toán lựa chọn động cơ dựa vào kết quả trên.
Thời gian tăng-giảm tốc thiết lập ở 0.2 giây.
Như vậy với việc vít me đã được lựa chọn ở bài trước, chúng ta có thể lựa chọn sơ bộ khớp nối và động cơ như sau.
Vít me mã: BSS1505-900
Khớp nối mã: CPDW32-10-11
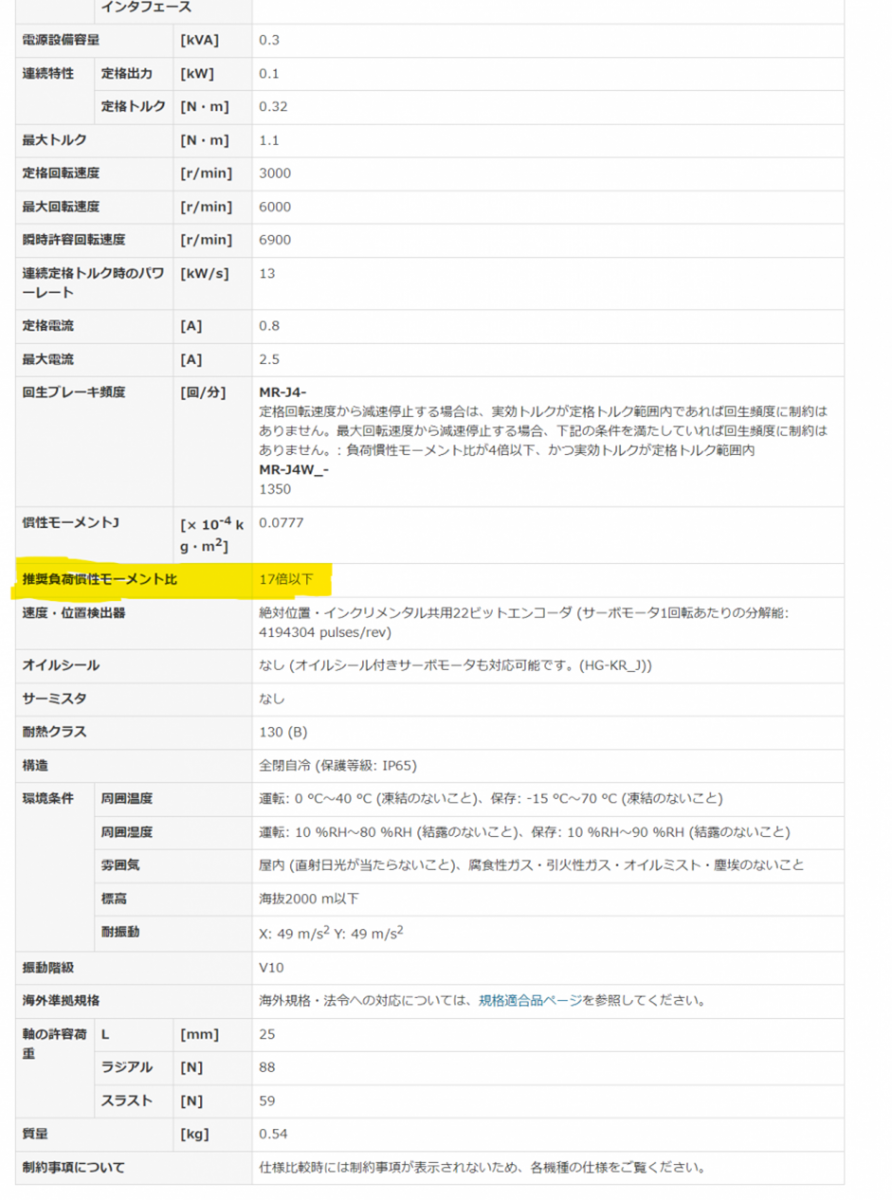
Động cơ servo: 200W-3000rpm
Mô men xoắn định mức: 0.637 N.m
Mô men xoắn cực đại: 2.23 N.m
Mô men quán tính của động cơ: JM=0.259 x 10-4 kg.m2 (JM)
Tỷ số Mô men quán tính cho phép của động cơ: 15 lần.
Bây giờ cùng tìm mô men quán tính của từng bộ phận.
Trước hết là những bộ phận được liệt kê trong danh mục, cụ thể ở đây là khớp nối có mã hiệu như sau:
Khớp nối: CPDW32-10-11
Mô men xoắn cho phép: 2.5 N.m
Tốc độ vòng quay cho phép: 19000 rpm
Mô men quán tính J2= 0.096 x 10-4 kg.m2 (J2)
Cần chú ý rằng, khi tra bằng catalog mô men quán tính là × 10-6, nhưng nhìn chung, có nhiều thiết bị có ký hiệu × 10-4, và cần điều chỉnh các chữ số theo đơn vị trong quá trình tính toán sau này, nên điều chỉnh lại trước khi tính toán.
Tiếp theo là vít me. Vít me sẽ tùy thuộc vào nhà sản xuất, trong trường hợp mã hiệu mà chúng ta lựa chọn được liệt kê đầy đủ trong catalog thì việc tính toán là không cần thiết, Nhưng mã hiệu lần này chúng ta chọn không có mô tả đầy đủ các thông số nên cần tiếp tục tính toán.
Những tính toán phức tạp về đầu trục hay đường kính trục sẽ cần phải được xem xét.
Chúng tôi cho rằng điều đó là cần thiết đối với một hệ thống máy móc lớn như máy công cụ, nhưng sẽ không cần thiết phải làm vậy đối với một hệ thống máy tự động loại nhỏ như cơ cấu P&P mà chúng ta đang phân tích.
Đối với trục vít me có thông số: Φ15x900 mm (thép)
Khối lượng: 1.24 kg

Chúng ta vẫn chưa có kết quả momen quán tính của bộ phận chuyển động nên sẽ tính tiếp. Khối lượng của phần chuyển động đã được tính toán lần trước. Khối lượng là 11.1 kg.

Như vậy ta có kết quả của mô men quán tính của các bộ phận liên quan ở trên. Ta sẽ tính tổng mô men quán tính của các bộ phận tải, ta gọi là mô men quán tính của tải.

Đến đây chúng ta sẽ so sánh mô men quán tính của tải Jt với mô men quán tính của động cơ JM , vì tỷ số mô men quán tính cho phép của động cơ: 15 lần nên động cơ này hoàn toàn ok. Tùy thuộc vào nhà cung cấp mà họ đưa ra những khuyến nghị khác nhau. Dưới đây là một tham khảo, khuyến nghị của Mitsubishi với động cơ có mã số HG-KR13 thì mô men quán tính của tải không nên vượt quá giá trị mô men quán tính của động cơ 17 lần. Tức tỷ số mô men quán tính cho phép của động cơ: dưới 17 lần.
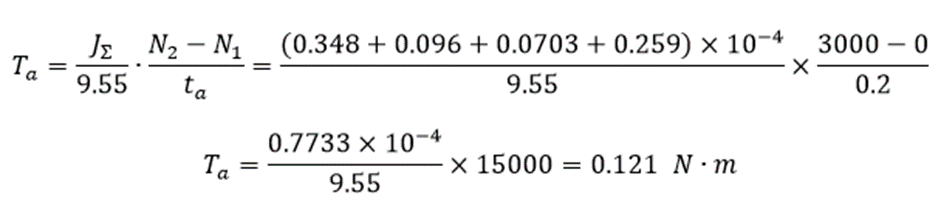
4.2 Tính toán mô men xoắn khi tăng tốc.
Với thời gian tăng tốc đã được phân tích ở bài trước là 0.2 giây.
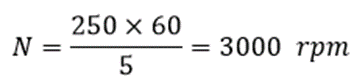
Tốc độ di chuyển là 250 mm/giây, bước ren của vít me là 5 mm, dựa trên các yếu tố trên ta tính được tốc độ vòng quay của động cơ là 3000 vòng/ phút.
Từ kết quả dưới đây cho thấy mômen xoắn khi tăng tốc so với mômen định mức của động cơ là hoàn toàn đáp ứng được yêu cầu.
Ở đây, khi mômen tăng tốc đạt khoảng 80% mômen định mức, chúng ta sẽ kiểm tra kết quả mômen quán tính. Nếu gần bằng 100% hoặc vượt quá một chút thì xem xét tỷ số mô men quán tính và mô men tải hiệu. Nếu dư thừa, động cơ 100W cũng thể chấp nhận được. Hãy tự mình tính toán và kiểm tra lại một lần. Việc lựa chọn động cơ servo, có nhiều phép tính cần thiết phải tính toán, và nếu bạn trải nghiệm tính toán vài lần, bạn sẽ có thể học được quy trình. Ngoài ra, nên giữ lại quy trình tính toán (công thức tính → thay số → kết quả tính toán) trong trường hợp cần kiểm tra kép (double check) hoặc khi gặp sự cố. Xin lưu ý rằng bạn sẽ không biết mình có mắc lỗi khi chọn động cơ servo hay không cho đến khi chạy thử nghiệm.
Như vậy chúng ta đã thử lựa chọn một động cơ servo cho cơ cấu. Xin được lưu ý lại một lần nữa với các bạn khi lựa chọn động cơ nói chung hay động cơ servo nói riêng, chúng ta cần xem xét và tính toán các đại lượng khác nhau, trên đây là hai đại lượng quan trọng. Ngoài ra, những đại lượng khác cần tính toán và so sánh với thông số mà nhà sản xuất đưa ra có thể kể đến như sau:
Nếu đáp ứng được các thông số trên đạt yêu cầu bạn có thể yên tâm mình đã chọn được một động cơ phù hợp cho cơ cấu. Trong bài viết tới, hãy cùng chúng tôi phân tích và xem xét các cảm biến không thể thiếu đối với cơ cấu P&P. Mọi thắc mắc xin để lại ở phần comment bên dưới bài viết. Cảm ơn các bạn đã đồng hành cùng chúng tôi.
Kiến thức bổ sung: Công thức liên hệ giữa công suất và mô men xoắn của động cơ. Mô men xoắn là một đại lượng vật lý biểu thị cho tác động của một lực làm quay một vật thể quanh một trục. Hiểu đơn thuần, mô-men xoắn là “độ khỏe” của động cơ. Mô-men xoắn càng lớn, động cơ càng thực hiện được nhiều công (sinh ra lực lớn hơn trên một quãng đường dịch chuyển). sau đây là công thức liên hệ.
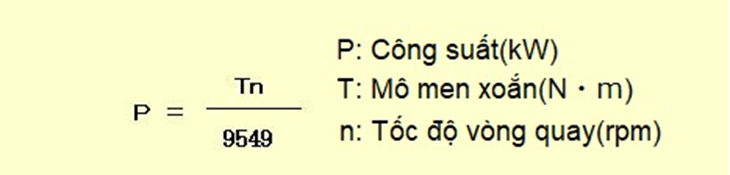
Ví dụ dưới đây khi bạn tính theo công thức trên sẽ cho ra các kết quả chính xác khi ta so sánh với các thông số mà nhà sản xuất khi trên nhãn dán.

Cảm ơn các bạn đã đồng hành cùng chúng tôi.
- XU HƯỚNG SỬ DỤNG ĐỘNG CƠ SERVO TRONG CÁC NGÀNH CÔNG NGHIỆP HIỆN NAY - April 04 - 5, 2024
- KHÁI NIỆM VÀ NHỮNG LỢI ÍCH CỦA ĐỘNG CƠ SERVO - April 04 - 3, 2024
- BẢNG MÃ LỖI SERVO POWMAX - April 04 - 2, 2024
- ĐỘNG CƠ SERVOR POWMAX - March 03 - 29, 2024
- SỰ CHUYỂN HƯỚNG CỦA NGÀNH BAO BÌ TRONG THẬP KỶ TỚI - March 03 - 19, 2024